
什么是随动
随动系统指的是两个部分一个主动移动,一个自动跟随主动部分移动。
在RoboMaster中,云台和底盘组成了我们的步兵机器人。操作手通过云台上的图传系统以第一视角操作机器人,这里就用到了随动系统:底盘跟随云台的旋转而旋转。
为什么要随动
对于操作手来说,操作手是以第一视角来进行操作的。当操作手发出向前移动的指令的时候,机器人需要以操作手视角的前进方向前进。机器人移动依靠底盘。看似好像没有随动什么事。来,让我们看看没有随动时的情况:
底盘运动是按照底盘的前后左右移动,所以当云台左右转动后,云台的前方向和底盘的前方向不是同一方向的。当操作手发出前进指令时,机器人会按照底盘的前进方向移动,而不是操作手的视野前方。操作手第一视角得到的反馈效果就是:我TM怎么在平移?(图下情况为向左前方移动)
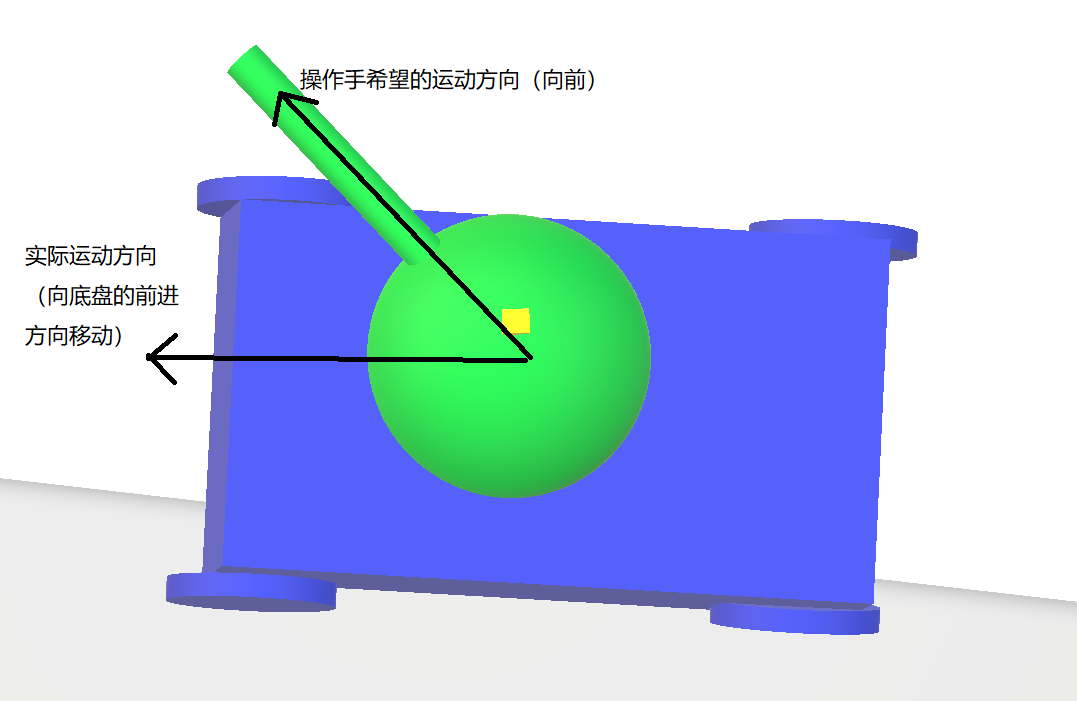
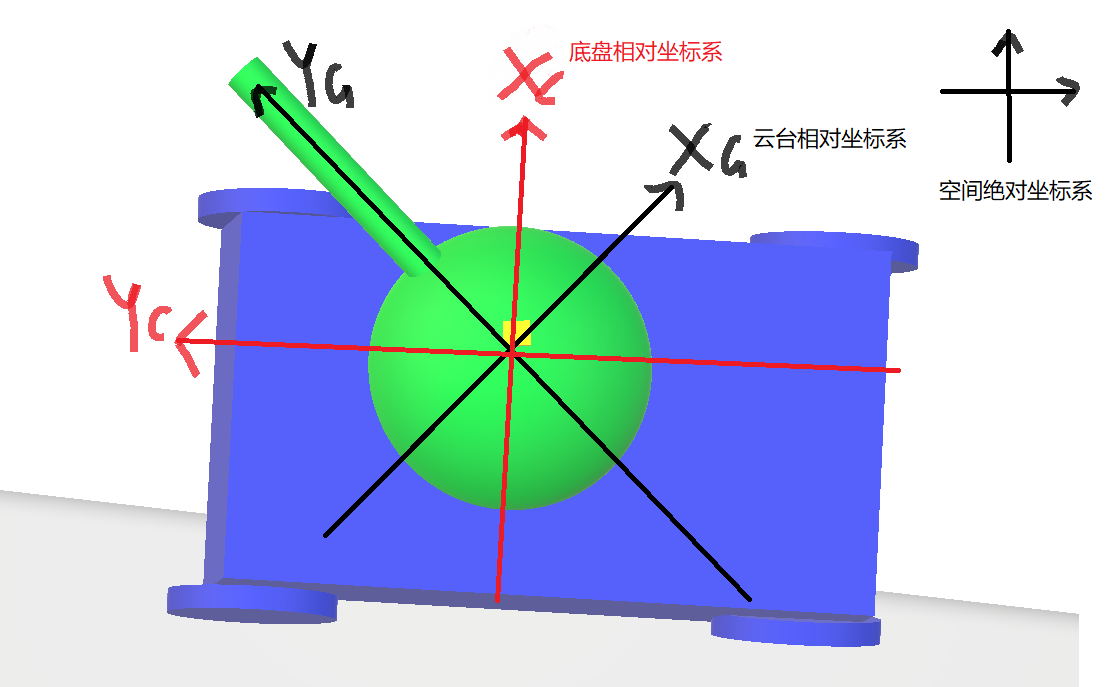
如此可以看出来,没有随动系统对于操作手来说简直是灾难!如何解决这个问题呢?只要我们云台左右旋转的时候,底盘也跟随旋转就可以了,达到底盘的前后左右和云台的前后左右相同就可以了,这就是我们随动的目标。(下文中将底盘的前后左右方向和云台的前后左右方向简称为底盘相对坐标系和云台相对坐标系)
实现方案
硬件介绍
云台

YAW轴电机
上图已经显示了我们控制云台方向的两个电机:YAW轴电机,PICTH轴电机,分别控制左右和上下转动角度。在云台-底盘随动系统中,我们只关心YAW轴电机。
YAW轴电机下半部分固定在底盘上,电机轴带动整个云台左右移动。
码盘
也叫编码器,这里说明的码盘是YAW轴电机的码盘。绝对式编码器,可以记录电机转动了多少角度。有编码器之后就可以测出底盘相对坐标系和云台相对坐标系的相对角度差(也就是在没有随动时的期望运动方向和实际运动方向之差)。
陀螺仪 & 磁力计
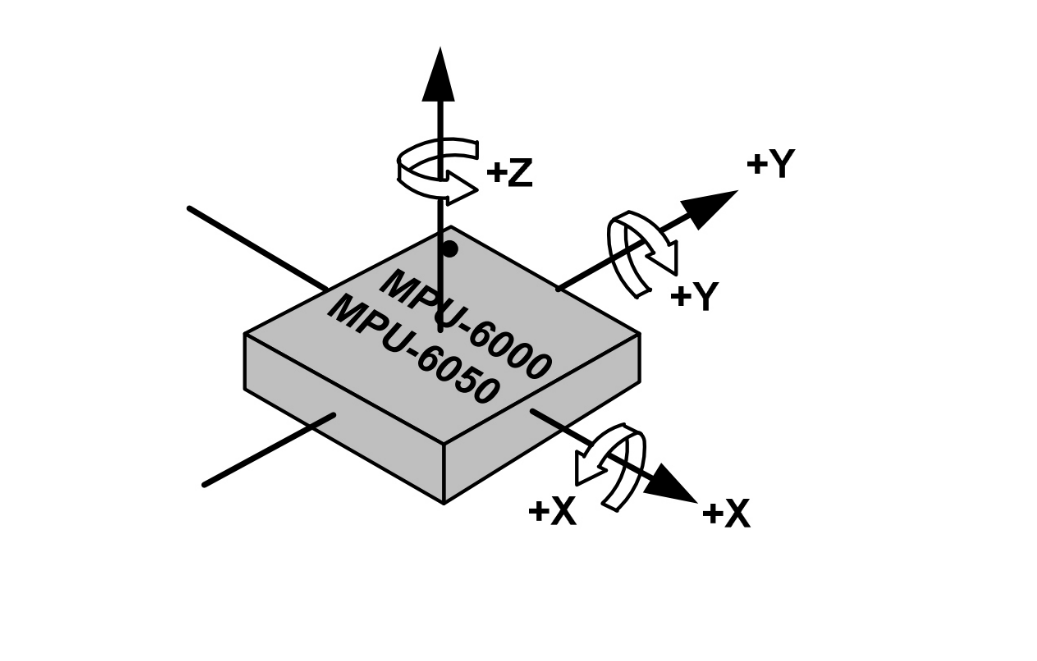
磁力计,安装在云台上,类似指南针,会告诉我们相对于地面来说,云台转了多少角度。获得的角度是云台相对坐标系和空间绝对坐标系的差(也就是我们操作手想让转动云台的期望值)。
底盘
麦克纳姆轮
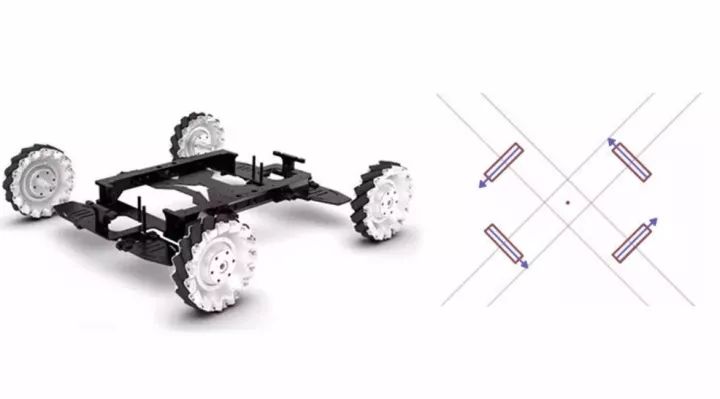
为了实现全向移动,底盘使用麦克纳姆轮,能实现左右平移,旋转。
麦轮可以实现全向移动,但也不是没有缺点,比如给电机输出同样的力,车子向前的合力只有原来的 1 / 根号 2 。
详细介绍:传送门
控制方法
设定
记住以下条件,这些是后文讲控制回路的基础:
云台YAW轴电机固定在底盘上。
云台通过云台YAW轴电机固定在底盘上。
磁力计测的是绝对角度。
码盘测的是相对角度。
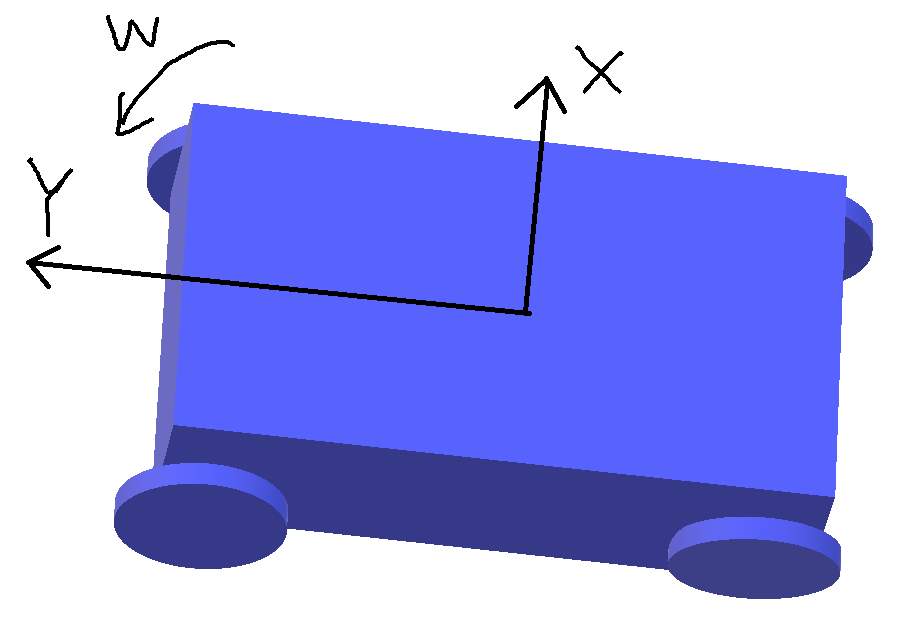
图示
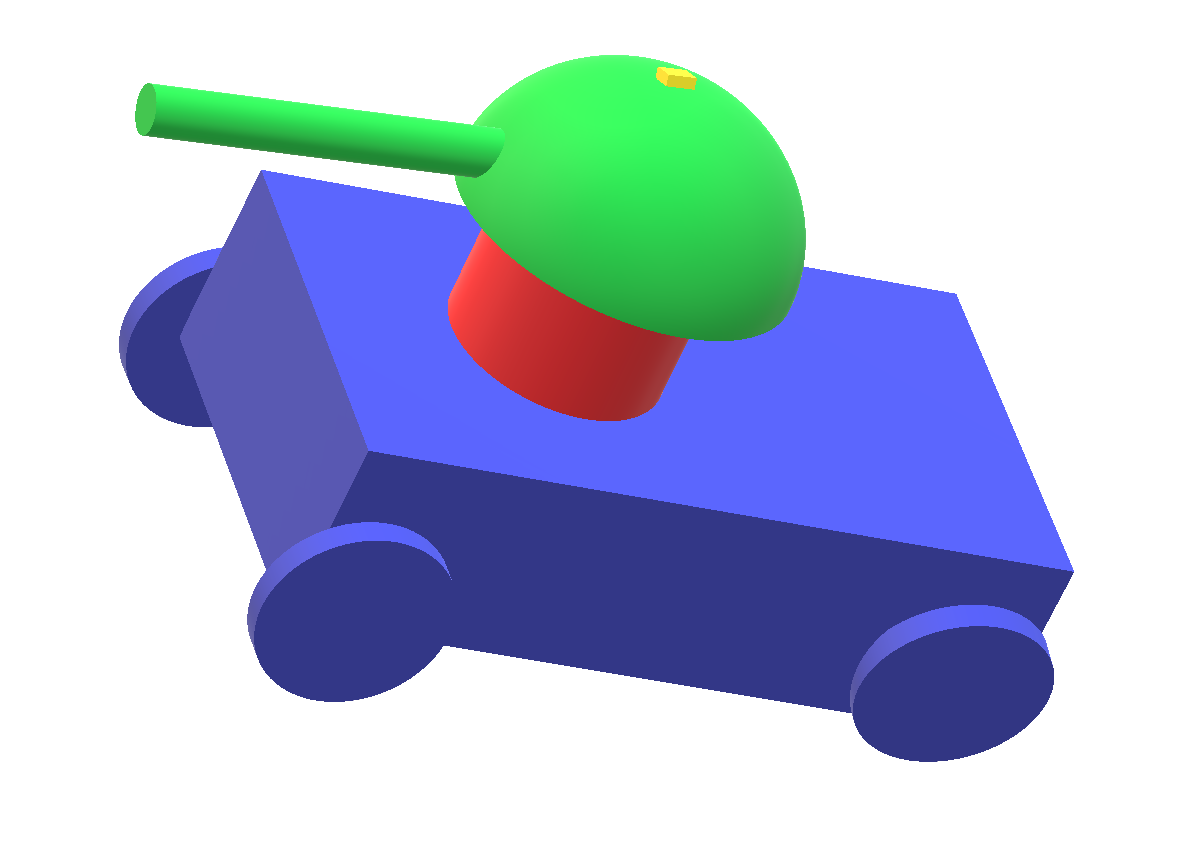
- 蓝色部分为底盘。
- 红色部分为云台YAW轴电机和码盘。
- 绿色部分为云台。
- 黄色部分为IMU(磁力计)。
控制阶段
云台转动
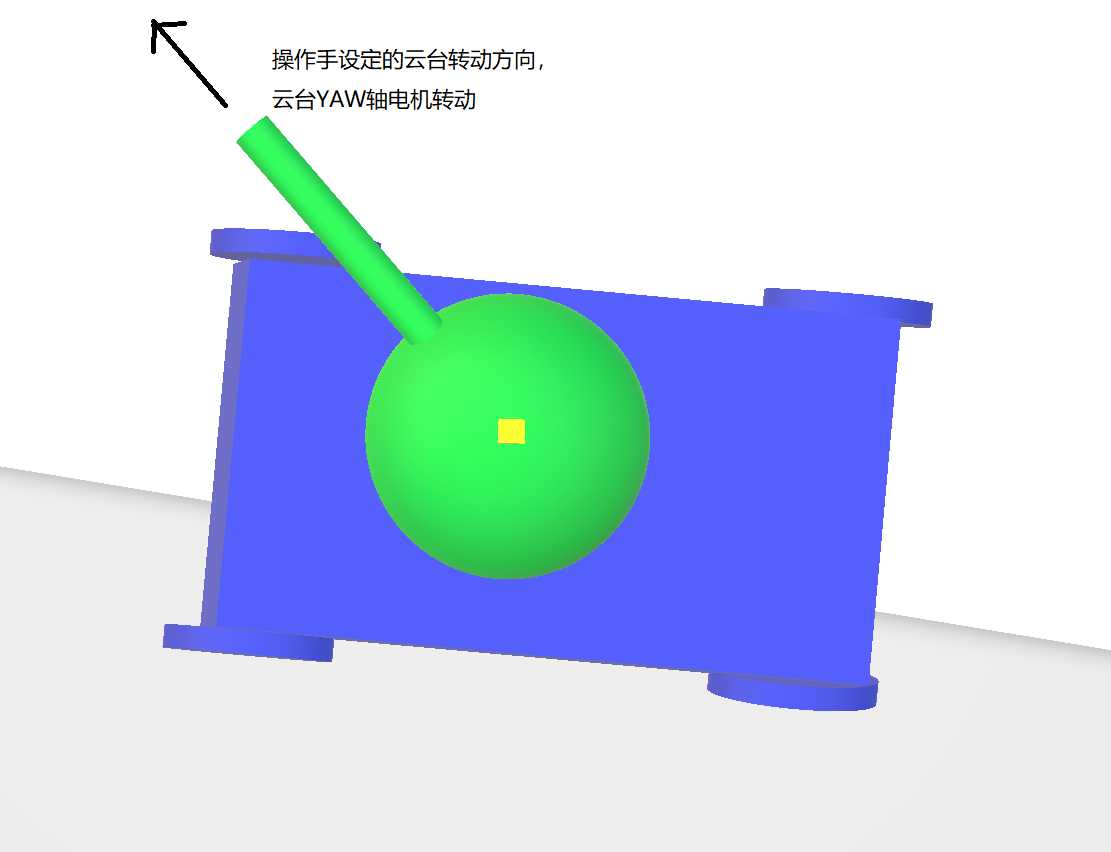
操作手通过鼠标或者遥控器发送云台转动角度给定值(云台相对坐标系和空间绝对坐标系的相差角度),云台YAW轴电机转动。
底盘转动
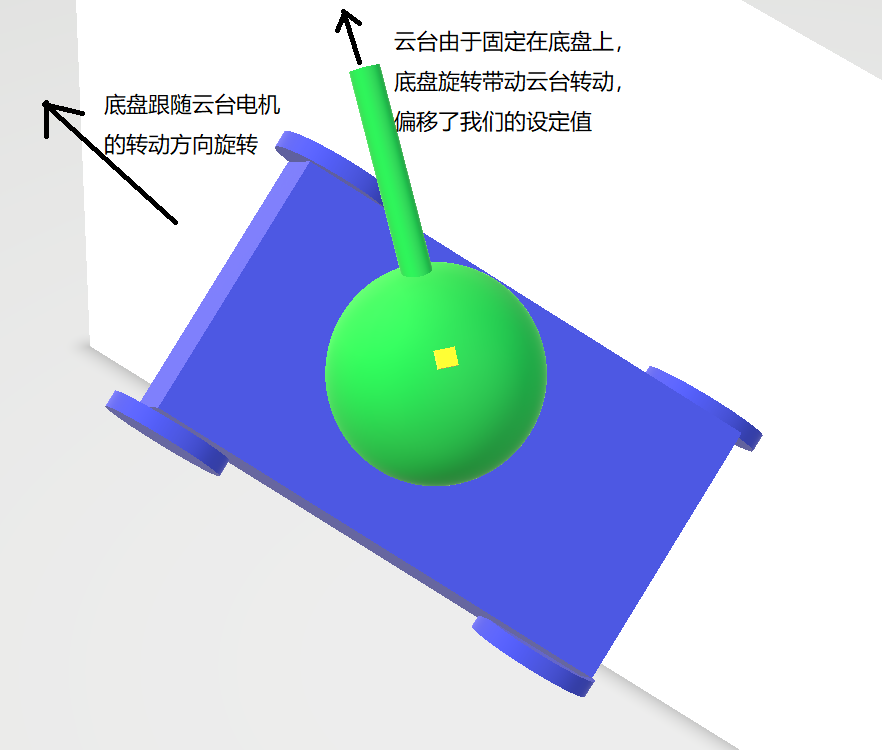
底盘跟随云台电机转动,底盘四个电机接受到旋转分量分解值。底盘向云台转动方向转动。
注意:云台是通过云台YAW轴电机固定在底盘上的,底盘转动时,云台由于这个固定关系被带动,偏移了我们的设定值。
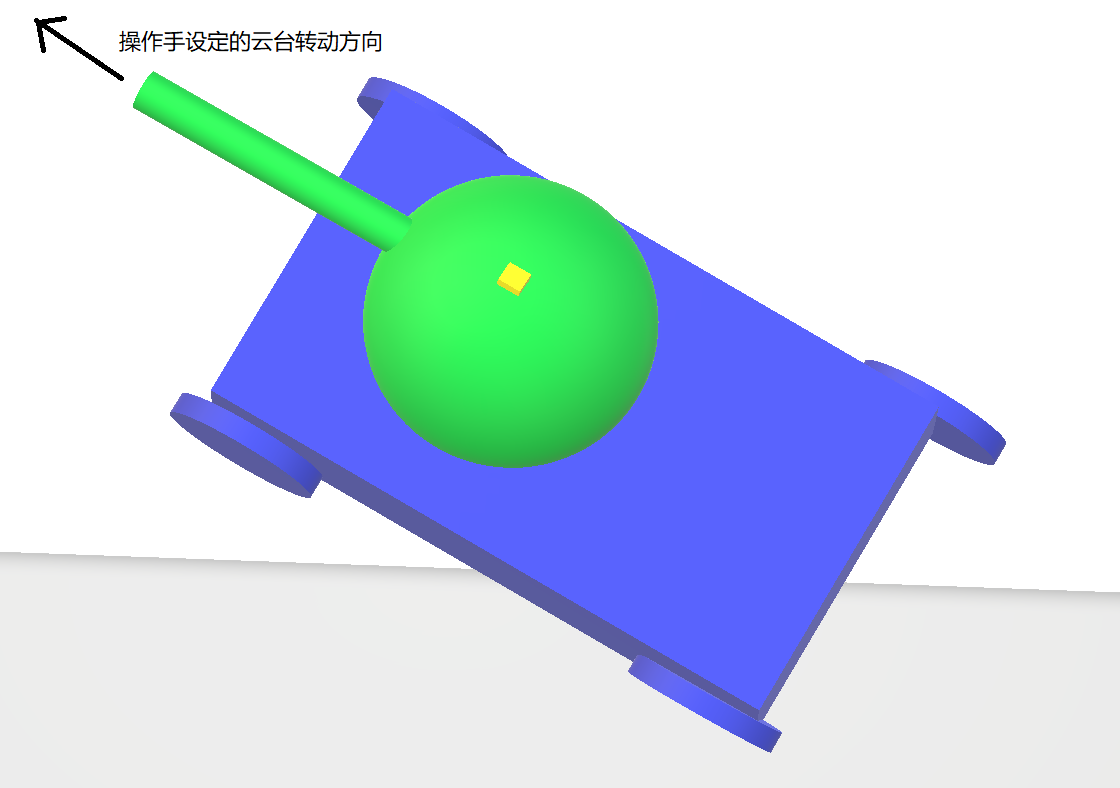
云台回转
由于云台被底盘带动,IMU检测发现云台没有在我们设定的方向上,于是按与之前相反的方向回转。云台底盘的相对坐标系重合,云台-底盘随动系统完成任务。
说明:这里是将随动的过程单位控制时间无限放大,响应速度无限提升。可以使用这一套方法来理解随动过程,但是实践运动过程中,由于我们控制回路的运行频率非常地高,所以从外面来看,这三个过程是同时完成的,底盘紧紧地跟着云台转动。
鸣谢
感谢鹏哥和阿金学长给我们细心讲解随动原理,虽然鹏哥吐槽我问太多为什么(在219单独问鹏哥原理问了一上午,也是辛苦了)。还要感谢RM的队友们,希望这一年我们可以合作愉快,做出成绩,一起冲进全国赛打进十六强!
Tell me and I will forget. Show me and I will remember. Involve me and I will understand. — Chinese proverb, From Robotics, vision and control, Fundamental Algorithms in MATLAB